
O Instituto Científico de Michigan Transdutor de pulso de roda de alta resolução (WPT) é um codificador óptico que atribui às porcas de roda da roda de um veículo. O WPT é comumente usado para rastrear a posição e velocidade de um veículo para aplicações como gerenciamento de frota e rastreamento de veículos autônomo. Este estudo de caso demonstrará a precisão do uso de dois Transdutores de pulso de roda juntos, comparando as medições de posição e velocidade com os dados do GPS.
Como funciona
O sinal do codificador é usado para calcular a posição angular e a velocidade da roda. Os dados registrados por dois WPTs em cada lado do carro podem ser calculados para encontrar o centro, dando assim a representação mais precisa da distância e velocidade que o carro viajou. Os veículos de mapeamento costumam usar WPTs para compensar as interrupções no sinal do GPS, permitindo o rastreamento da distância percorrida durante a perda do sinal. Neste estudo, a alta resolução dos dados WPT teve um desempenho muito melhor do que o sensor GPS que foi usado devido à sua alta taxa de amostragem de 10,000 Hz.
Test Setup
Para comparar os resultados do Transdutor de pulso da roda com os resultados do GPS, dois sistemas WPT foram acoplados a um veículo, um no lado traseiro direito e outro no lado esquerdo traseiro. Os transdutores foram montados nas rodas traseiras para que o movimento de rotação das rodas dianteiras não tivesse que ser compensado nos dados. Um dispositivo GPS foi colocado em cima do veículo, no centro do teto acima das rodas traseiras, onde daria a leitura mais precisa. As distâncias e velocidades do WPT à esquerda e à direita foram calculadas para corresponder ao sinal de GPS no centro do veículo. O curso de uma milha mostrado abaixo, junto com um gráfico de latitude e longitude do GPS, inclui uma manobra circular e em zigue-zague.
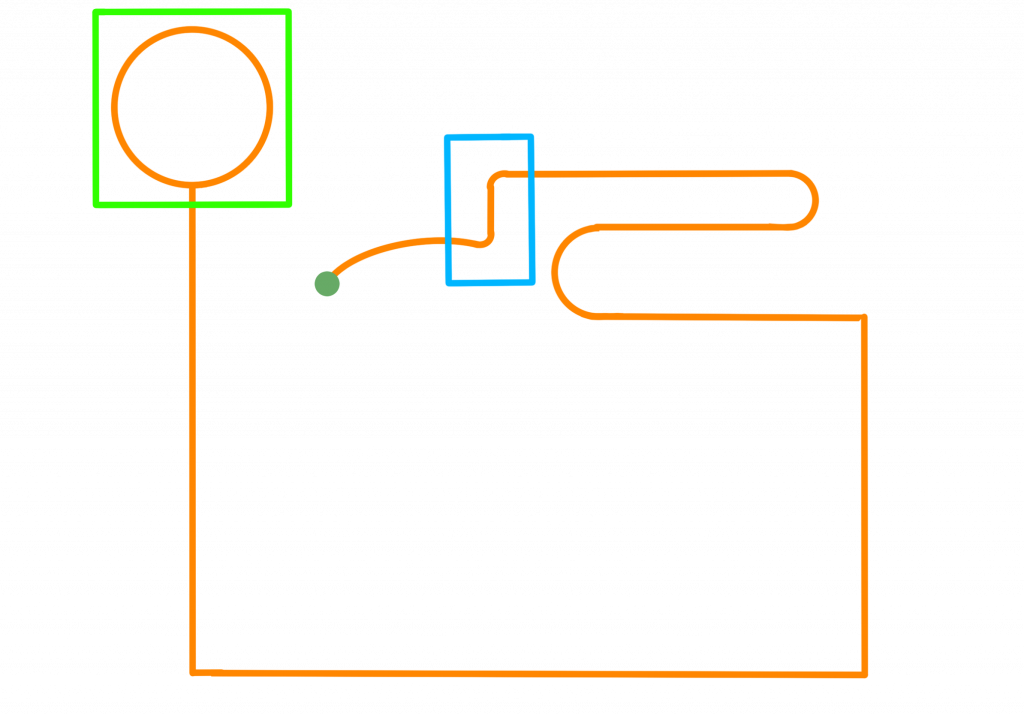
Esboço da pista de teste
Dados GPS da pista de teste
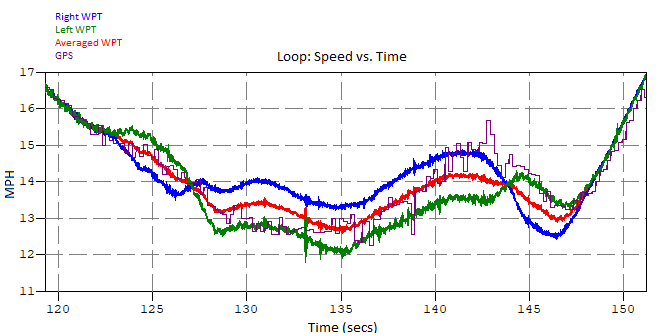
laço
Ao ir no sentido anti-horário em torno da parte circular da pista de teste (mostrada em verde acima), seria de se esperar que a velocidade e a distância da roda direita fossem muito mais altas do que a esquerda. Olhando para os dados, mostrados abaixo, isso é verdadeiro. As velocidades da roda direita (azul) e esquerda (verde) são calculadas em média (vermelho) e se alinham quase perfeitamente com os dados do GPS (roxo).
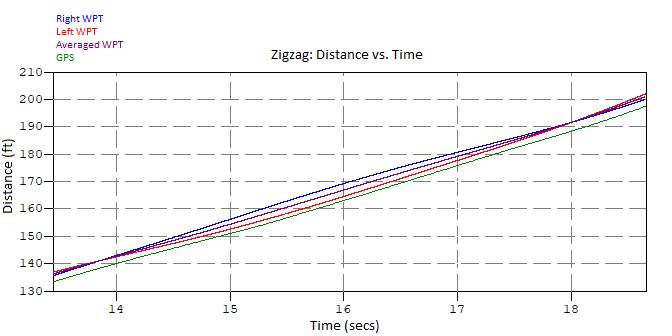
Caminho em ziguezague
A área contendo uma curva rápida à direita e à esquerda, mostrada dentro do quadrado azul no contorno da pista de teste, oferece outra perspectiva interessante. Para o gráfico de velocidade abaixo, o veículo foi manobrado com uma curva rápida à esquerda e, a seguir, imediatamente à direita. A forma em “W” criada por isso mostra que a roda esquerda (roxa) foi mais lenta do que a direita (verde) na curva à esquerda, então a esquerda foi mais rápido do que a direita na curva à direita. Enquanto os dois lados opostos trocam de lugar durante a manobra, a média calculada (vermelho) e os dados do GPS (azul) ficam próximos no meio.
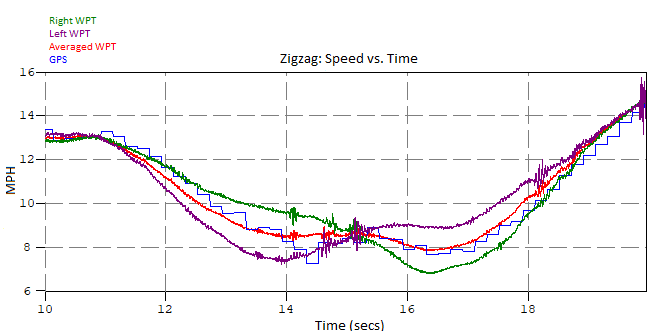
O tempo entre os dois pontos de interseção no gráfico abaixo é onde ocorreram as curvas à esquerda e à direita. A roda direita (azul) ultrapassa a roda esquerda (vermelha) na distância percorrida por ter um raio maior para girar na curva à esquerda, que inicia em torno de 14 segundos e termina em aproximadamente 15.5 segundos. Neste ponto, a roda direita viajou mais longe do que a roda esquerda. A curva à direita começa pouco antes de 17 segundos, e a roda esquerda alcança a roda direita no momento em que a curva termina em aproximadamente 18 segundos. A distância média (roxa) percorrida permanece centralizada entre os dois. Como a inclinação da distância média e do GPS é a mesma, eles ainda estão registrando a mesma velocidade e mudança na distância. No entanto, o GPS está atrasado alguns metros atrás do volante, daí o pequeno desvio nos dados.
erro
Os últimos dados do teste podem mostrar os benefícios de usar dois WPTs em vez de apenas um. Se apenas um WPT fosse usado, as distâncias registradas teriam um erro máximo de 0.22%. No entanto, ao instalar dois WPTs e fazer a média deles, o erro é de apenas 0.0115%, uma diminuição de um fator de 19. Isso mostra que o uso de dois Transdutores de pulso de roda pode ajudar a reduzir o erro que pode se acumular em várias voltas.
Este teste é apenas um de uma infinidade de testes diferentes que utilizam Transdutores de pulso de roda. Ter um sistema de medição durável e preciso é benéfico para rastrear com precisão a posição e velocidade de um veículo em qualquer ambiente. Se você gostaria de discutir seu aplicativo de teste de roda, entre em contato com um representante da Michigan Scientific hoje mesmo.